ML-guided exploration and discovery
Data-driven exploration and discovery in science and engineering are challenging when dynamics are complex and data are limited. I develop methods that use probabilistic machine learning models to guide exploration based on uncertainty quantification.
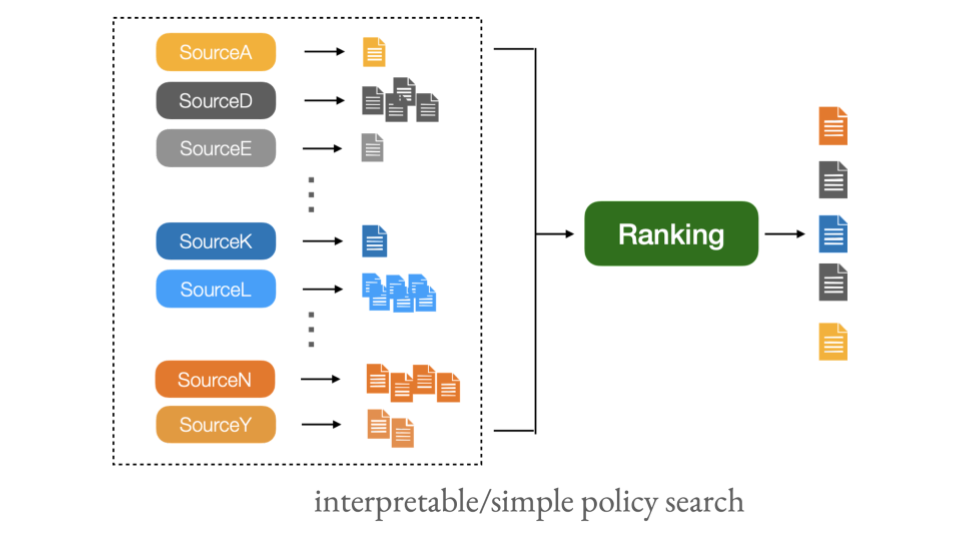
- Searching for simple/interpretable solutions in black-box optimization [1].
- Simultaneously optimize objective and solution simplicity, by drawing connections between multi-objective Bayesian optimization and regularized acquisition functions.
- Simple solutions provide interprebilty to the outcome and reduce cost of deployment and maintenance.
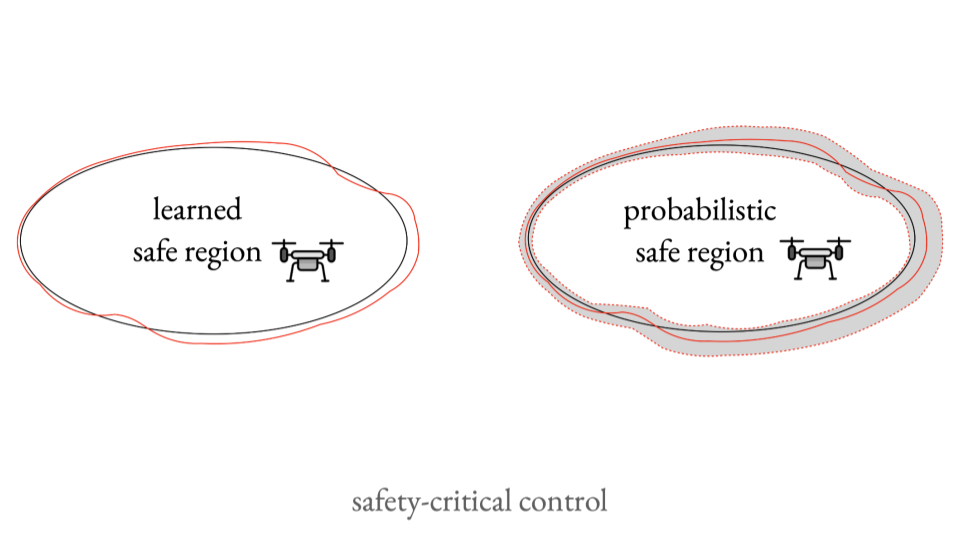
- Learning to control robotic system with safety constraints [2].
- Developed probabilistic safety certificates for control barrier functions based on uncertainty quantification.
Related Publications
[1] Sparse Bayesian Optimization. Paper
Sulin Liu* (equal contr.), Qing Feng*, David Eriksson*, Benjamin Letham, Eytan Bakshy.
International Conference on Artificial Intelligence and Statistics (AISTATS), 2023.
[2] ProBF : Probabilistic Safety Certificates with Barrier Functions. Paper
| Code
Athindran Ramesh Kumar*, Sulin Liu* (equal contr., random order), Jaime F. Fisac, Ryan P. Adams, Peter J. Ramadge.
Preprint, 2021.
short version at NeurIPS Safe and Robust Control of Uncertain Systems Workshop, 2021.